DC MOTOR
Robotikte en sık tercih edilen motor tipi DC motorlardır. DC motorlar ucuz,
küçük ve etkilidir. Ayrıca boyut, şekil ve güç bakımından çok çeşitli olmaları
da DC motorların sık kullanılmalarının bir diğer sebebidir.
DC motorlar robotlarda veya herhangi bir sistemde direkt ya da dişli
kutularıyla (redüktörlü ya da redüktörsüz olarak) birlikte
kullanılabilirler. DC motorların robotlarda kullanımına dair temel özellikler
aşağıda açıklanmıştır.
Yön:
DC motorlara bir güç kaynağı bağlandığında DC motorun dönüş yönü akımın
yönüne bağlıdır. Akımın yönü terslendiğinde DC motorun dönüş yönü de terslenmiş
olur.
Hız:
Bir motorun hızı rpm (rotations per minute - bir dakikada tamamlanan devir
sayısı) ile ölçülür. Motorun hızı voltaja ve yüke bağlıdır.
Bir DC motorun hızının voltaja ve yüke göre değişimini değerlendirmek için
iki durum düşünülebilir. Bunlardan ilki; DC motora yük binmeyen ya da sabit bir
yükün olduğu bir sistemdir. Böyle bir sistemde DC motorun hızı uygulanan voltaja
bağlıdır ve voltaj arttıkça hız da artar. İkinci durum ise; DC motora binen
yükün zamana ya da gerçekleştirilen göreve göre değiştiği bir sistemdir. Bu
durumda DC motorun hızı yüke bağlı olacaktır. Yük arttıkça uygulanan güç de
artar ve güç arttıkça hız azalır.
Voltaj:
Küçük DC motorlar 1,5 V ile 48 V arasında değişen voltaj değerlerine sahip
olarak bulunabilirler. Her bir DC motor için belirtilen voltaj değeri, o DC
motorun kendi verilen hız, güç ve akım değerlerinde stabil çalıştığı voltaj
değeridir. Robotlarda ve diğer sistemlerde DC motorları kullanırken de bu
voltaj değeri, DC motora verilecek maksimum çalışma voltajını belirlediği için
önemlidir.
Akım:
Bir DC motor belirtilen voltaj değerinde çalıştırıldığında DC motorun
çekeceği akım yüke bağlıdır. Yük arttıkça DC motorun çektiği akım da artar. DC
motor, maksimum akım sınırının aşılacağı fazla bir yükle çalıştırılmamalıdır.
Böyle bir durumda DC motor kısa devreye neden olur ve uygulanan güç ısıya
dönüşür. Bu durum uzun sürerse DC motor yanabilir. Genellikle DC motorların
uygulama akımı aralığı 50 mA den başlayıp 2A üzerine kadar çıkabilir.
Güç:
Güç bir motorun akımı ve voltajının çarpım değeridir. Ancak robot
projelerinde ve mekanik sistemlerde bir motorun ürettiği kuvvetin tork (motorun
dönme momenti) cinsinden değerlendirilmesi normaldir.
Tork motorun dönme momentidir. Torku yüksek olan motor düşük olana göre
daha güçlüdür. Tork motorun elektriksel ve mekanik karakteristiklerine ve motor
şaftının yarı çapına bağlıdır. Bir motorun torku motora bağlanan dişli kutularıyla
(redüktör) değiştirilebilir. Dişli kutuları hızın azaltılmasını ve gücün
arttırılmasını sağlar. Örneğin; motor şaftının yarıçapının 10 katı yarıçapa
sahip bir dişli motora eklendiğinde, motorun hızı 10 kat düşer ve gücü de 10
kat artar.
Robotikte, çeşitli boyutlarda ve redüksiyon oranlarında dişli kutuları
motorun karakteristik özelliklerini isenilen işi yapabilecek düzeye getirmek
için sıklıkla kullanılır. Bir motoru kullanırken torkunu bilmek önemlidir. Tork
ve redüksiyon oranı bilindiğinde sistemin son çıkış gücü kolaylıkla
belirlenebilir.
Yüksek Torklu Motor Nasıl Seçilir?
*Yüksek torklu motorlar
içerisindeki güçlü magnetlerden dolayı ağırdırlar.*DC motorun şaftının kalın olması torkunun yüksek olmasının, şaftın ince olması ise torkunun düşük olduğunun belirtisidir.
*Yüksek torklu motorların şaftını parmaklarınızla aniden döndürmeye çalıştığınızda bir dirençle karşılaşırsınız.
*Yüksek torklu motorlardan yüksek akım geçeceğinden motorların bağlantı kabloları daha kalın olur.
DC MOTOR KONTROLÜ
Mikrodenetleyicilerin çıkışları direkt DC motorları sürmek için
yetersizdir. Bu yüzden motorları sürmek için çıkışlarını yükseltmek gerekir.
Bunun için transistör ya da özel motor sürücü entegreler kullanılır.
H Köprüsü Devresi
H köprüsü devreleri transistörler ya da fetler ile DC motorların direkt
elektrik sinyallerinden kontrol edilmesi için hazırlanan devrelerdir.
Transistör
|
Fet
|


Yukarıdaki devreler de 5 V sinyal verildiğinde motor dönmeye başlar, 0 V
sinyal verildiğinde ise motor durur. DC motorların kontrolünde motor yönünün
terslenebilmesi gerekmektedir. Transistörler tek kutuplu elemanlar olduğundan
motor yönünün terslenebilmesi için iki yada dört transistör ile hazırlanan
devreler kullanılır.
İki Transistörlü Yarım Köprü Devresi
|

İki transistör kullanılarak hazırlanan yarım köprü motor kontrol
devrelerinde kontrol voltajının kutbu kullanılan transistörün tipine bağlıdır.
NPN transistör ya da P kanal Fet kullanılıyor ise bu elemanlar pozitif voltaj
uygulandığında iletime geçer. PNP transistörler ise negatif voltaj uygulandığında
iletkendir.
Yarım köprü devresi için yukarıda verilen şemada; birinci girişe sinyal
verildiğinde motor ileriye doğru döner, ikinci girişe sinyal verildiğinde motor
geriye doğru döner, her iki girişe de sinyal verilmediğinde motor durur. İki
girişe aynı anda sinyal vermek bataryalarda kısa devreye neden olacağı için
yasaklı bir koşuldur.
Yarım köprü devrelerinin dezavantajı dual ya da simetrik bir güç
sağlayıcının kullanılmasının gerekmesi ve devrenin karmaşıklaşmasıdır. Bu
nedenle dört transistörlü H köprüsü devrelerinin kullanılması daha uygundur.
Dört Transistörlü H Köprüsü Devresi
 |
H köprüsü devresinde iki sinyal kaynağı kullanılmaktadır. Bu uygulamada
dört olasılık bulunmaktadır.
1) Birinci girişe sinyal verildiğinde motor ileriye doğru döner,
2) İkinci girişe sinyal verildiğinde motor geriye doğru döner,
3) Her iki girişe de sinyal verilmediğinde motor durur,
4) Her iki girişe aynı anda sinyal vermek yasaklı koşuldur.
Yarım köprüde ya da H
köprüsünde kullanılacak olan transistörler kontrol edilecek olan akıma
bağlıdır. Bu akım motorlara göre kararlaştırılır ve birkaç miliamperden 2 amperin
üstündeki akım değerlerine kadar değişebilir.2) İkinci girişe sinyal verildiğinde motor geriye doğru döner,
3) Her iki girişe de sinyal verilmediğinde motor durur,
4) Her iki girişe aynı anda sinyal vermek yasaklı koşuldur.
STEP MOTOR
Step motorlar elektriksel palsleri ayrı
mekanik hareketlere çeviren araçlardır. Step motorlar terminallerine voltaj
uygulandığında dönen DC motorlardan farklı çalışırlar. Step motorlarda ortada
mıknatıs veya metalden oluşan rotor ve statoru çevreleyen bobinler vardır. Step
motorun rotorunun etrafını çevreleyen bobinlere sürücü devre tarafından
sinyaller gönderilir. Böylece yaratılan elektromanyetik etki ile step motor
küçük bir dönüş yapar. Diğer sinyalde bir sonraki bobine sinyal verilmesiyle
elektromanyetik çekim bu kez de o bobine doğru gerçekleşir ve böylece küçük
hareketlerle dönme işlemi sürdürülür. Bu küçük dönüş hareketlerinin her birine
bir adım denir.
Step Motorların Avantajları:
* Step motorlar hassas kontrol gerektiren
projelerde kullanılır. Çünkü step motorların adımlarındaki hata sayısı düşüktür
ve bir adımdaki hata bir sonraki adımı etkilemez.
* Step motorların rotasyon açısı giriş palsi ile orantılıdır.
* Step motorlar durmak, yön değiştirmek ve harekete başlamak için gönderilen sinyallere çabuk cevap verirler.
* Dijital olarak kontrol edilebildikleri için bilgisayar kontrollü uygulamalarda kullanılmaya da yatkındırlar.
* Step motorların hızı girş palslerinin frekanslarıyla orantılı olduğundan geniş bir rotasyonel hız aralığına sahiptirler.
* Step motorların rotasyon açısı giriş palsi ile orantılıdır.
* Step motorlar durmak, yön değiştirmek ve harekete başlamak için gönderilen sinyallere çabuk cevap verirler.
* Dijital olarak kontrol edilebildikleri için bilgisayar kontrollü uygulamalarda kullanılmaya da yatkındırlar.
* Step motorların hızı girş palslerinin frekanslarıyla orantılı olduğundan geniş bir rotasyonel hız aralığına sahiptirler.
Step Motorların Dezavantajları:
* Step motorlarında diğer
motorlara göre daha fazla olan titreşim bazı hız değerlerinde tork kayıplarına
neden olabilir. Bu titreşimler faz sayısı fazla olan motorlarda faz sayısı az
olan motorlara göre daha azdır. Titreşimlerden doğan tork kaybı sorununu çözmek
için step motoru titreşim yaratacak hız aralığında çalıştırmamaya özen
gösterilmelidir.* Çok yüksek hızlarda kolaylıkla kontrol edilemezler.
* Step motorlar, DC ve Servo motorlara göre daha karmaşık sürücü devrelere ihtiyaç duyabilirler.
Sabit Mıknatıslı Step Motorlar (Permanent Magnet Stepper Motors-PM)
Bu tip step motorlarda isminden de anlaşılacağı gibi step motorun rotor kısmında sabit mıknatıslar bulunur. N ve S kutupları rotor şaftına parelel düz çizgiler halindedirler. Sabit mıknatıslı step motorların stator bobinlerine uygulanan voltaja ve bobinlerden geçen akımın yönüne bağlı olarak step motorun dönüşü sağlanır. Bu mıknatıslanan rotor kutupları manyetik akış yoğunluğunu arttırır. Bu durumdan dolayı sabit mıknatıslı step motorlar, değişken relüktanslı step motorlara göre daha gelişmiş tork karakteristiklerine sahiptirler. Statorun sargılarından geçen akım büyüdükçe, elektromanyetik alan ve buna bağlı olarak da tork artar. Manyetik kutup sayısı ve stator dişleri ne kadar az ise adım sayısı o kadar azalır ve buna bağlı olarak da adım açısı artar.
Değişken Relüktanslı Step Motorlar (Variable Reluctance Stepper Motors-VR)
Step motorların en basit tipi olan değişken relüktanslı step motorlarda rotor yumuşak demirdendir ve etrafında silindir eksenine paralel dişler vardır. Stator dişlerine DC akım verildiğinde kutuplar mıknatıslanır ve stator dişlerinin rotor dişlerini çekmesiyle adım hareketi gerçekleşir. Değişken relüktanslı step motorların rotorları sabit mıknatıslılara göre daha küçük ve hafif olması onları daha hızlı yapar. Değişken relüktanslı step motorlarda stator dişleri ile rotor dişleri arasındaki boşluk ne kadar az olursa, oluşan manyetik kuvvetin aradaki hava boşluğundan dolayı uğrayacağı kayıp da o kadar düşük olur.
Hibrit Step Motorlar (Hybrid Stepper Motors-HB)
Hibrit step motorlar adım kararlılığı, tork ve hız bakımından daha iyi bir performansa sahip olduklarından sabit mıknatıslı step motorlara göre daha pahalıdırlar. Tipik hibrit step motorlarının adım açıları 3,6 º ile 0,9 º aralığındadır. Hibrit step motorlar, sabit mıknatıslı step motorların ve değişken relüktanslı step motorların en iyi yanlarını bir araya toplar. Rotor değişken relüktanslılarda olduğu gibi çok dişlidir ve şaftı etrafında eksensel olarak magnetize olmuş eşmerkezli bir magnet içerir. Rotor etrafındaki dişler, hava boşluğu içinde manyetik akımın istenilen poziyona gelebilmesi için daha iyi bir yol sağlar. Böylece hibrit step motorlarda, değişken relüktanslı ve sabit mıknatıslı tiplere tutunma ve dinamik tork daha yüksek olur.
En sık tercih edilen step motor tipleri hibrit step motorlar ve sabit mıknatıslı step motorlardır.
Unipolar Step Motorlar:
Bipolar Step Motorlar:
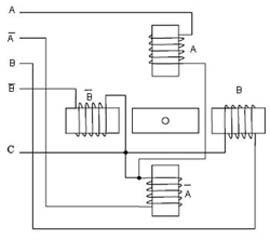 Step motorlarda dört adet bobinden çıkan 4 ayrı uç ve bir de ortak uç olmak üzere 5 adet uç bulunmaktadır. Ortak ucun hangisi olduğunu bulmak için ohmmetre ile ölçüm yapılır. Ortak uç ile diğer uçlar arasında sabit bir direnç okunur, böylelikle ortak uç bulunur. Step motorlar direkt mikrodenetleyici çıkışından çalıştırılamazlar, çıkışların yükseltilmesi için transistör, Fet ya da özel step motor sürücü entegrelerin kullanılması gerekir. Ortak uca motorun çalışma gerilimi uygulanır ve diğer 4 uç da transistör ya da fet gibi anahtarlama elemanlarına bağlanır. Bu 4 ucun bağlantısı doğru olduğunda motor döner, yanlış olduğunda ise motor titreme yapar. Böyle bir durumda 4 ucun bağlantıları değiştirilerek yeniden denenmelidir. Doğru bağlantıyı bulana dek denemeye devam edilir. Bazı step motorlar 4 bobin ikişerli gruplara ayrılarak birer ortak uç çıkarıldığından 6 uçludur. İki ortak uç birleştirilerek 5 uçlu bir step motor gibi kullanılır. Yandaki şemada 5 uçlu bir step motor gösterilmektedir.
Step motorlarda dört adet bobinden çıkan 4 ayrı uç ve bir de ortak uç olmak üzere 5 adet uç bulunmaktadır. Ortak ucun hangisi olduğunu bulmak için ohmmetre ile ölçüm yapılır. Ortak uç ile diğer uçlar arasında sabit bir direnç okunur, böylelikle ortak uç bulunur. Step motorlar direkt mikrodenetleyici çıkışından çalıştırılamazlar, çıkışların yükseltilmesi için transistör, Fet ya da özel step motor sürücü entegrelerin kullanılması gerekir. Ortak uca motorun çalışma gerilimi uygulanır ve diğer 4 uç da transistör ya da fet gibi anahtarlama elemanlarına bağlanır. Bu 4 ucun bağlantısı doğru olduğunda motor döner, yanlış olduğunda ise motor titreme yapar. Böyle bir durumda 4 ucun bağlantıları değiştirilerek yeniden denenmelidir. Doğru bağlantıyı bulana dek denemeye devam edilir. Bazı step motorlar 4 bobin ikişerli gruplara ayrılarak birer ortak uç çıkarıldığından 6 uçludur. İki ortak uç birleştirilerek 5 uçlu bir step motor gibi kullanılır. Yandaki şemada 5 uçlu bir step motor gösterilmektedir.
 Standart servo motorların üç kablosu vardır. Bunlardan biri power (4 V ile 6 V arasında), biri toprak, diğeri ise kontrol girişi içindir. Kabloların renkleri ise genellikle power için kırmızı, toprak için siyah ve kontrol için beyazdır.
Standart servo motorların üç kablosu vardır. Bunlardan biri power (4 V ile 6 V arasında), biri toprak, diğeri ise kontrol girişi içindir. Kabloların renkleri ise genellikle power için kırmızı, toprak için siyah ve kontrol için beyazdır.
Normal robotik uygulamalarında sıklıkla kullanılan servo motorlar için bu voltaj değeri genellikle 4 V ile 6 V aralığındadır. Bu aralığın dışında özel tipte servo motorlar da bulunabilir.
Akım:
Burada akım ile kastedilen servo motorun bir yüke maksimum tork uyguladığında çektiği akımdır. DC motorlarda olduğu gibi bu akım değeri yüke göre değişir. Genellikle servo motorların maksimum akım aralığı 100 mA ile 2 A arasıdır.
Uygulama Hızı:
Uygulama hızı servo motoru şaftının belirli bir pozisyona (normalde 60 º) gelebilmesi için gereken zaman olarak tanımlanır. Genellikle servo motorların uygulama hızları 0,05 s / 60 º ile 0,2 s / 60 º arasındadır.
Tork:
Diğer motorlarda oludğu gibi tork kg / cm ya da N-cm olarak verilir. Genel tork değerleri 0,5 kg / cm ile 10 kg /cm arasındadır.
Kontrol Palsi:
Kontrol palsi şaftın belli bir pozisyona gelebilmesi için kullanılan pals tipidir. Uygulamalarda kullanılan iki ana tip vardır. Bunlar 1-2 ms aralığında pals ve 1,25-1,75 ms aralığında pals değerleridir.
Kararlılık:
Kararlılık, bir komut sinyali algılandığında servo motorun şaftının pozisyonunun istenilen açıya göre kesinliğidir. Genellikle servo motorların kararlılık aralığı 1 º ile 10 º arasındadır.

Faz başına iki sargı içeren step motorlardır. Bu sargılardan biri akım yönü içindir ve bu sayede manyetik kutuplar, akım yönü değiştirilmeksizin terslenebilir. Bu sayede her sarım için komutasyon devresi çok kolay şekilde (bir transistör ile) yapılabilir. Genelde her sarım için bir uç ortaktır, her faz için de 3 uç vardır. İki fazlık bir step motorda 6 uç bulunur. Sıklıkla bu iki fazın ortak uçları içeride birleştirilir, sonuçta 5 kablo ucu olur.
Bipolar Step Motorlar:
Faz başına tek sargı içeren step motorlardır. Magnetik kutbu terslemek için sarımdaki akımı ters yöne çevirmek gerektiğinden, bipolar step motorların sürücü devreleri unipolarlara göre daha karmaşıktır. Sürücü devre olarak genellikle H köprüsü devreleri kullanılır. Bipolar step motorlarda faz başına iki uç vardır ve ortak uç yoktur. Sarımlar bipolar step motorlarda daha iyi kullanıldığından aynı ağırlığa sahip unipolar ve bipolar step motorlardan bipolar olanın torku daha yüksektir.
STEP MOTOR KONTROLÜ
Step motorlar fırçasız doğru akım motorlarıdır. Fırçasız motorlar fırçalı motorlara göre daha uzun ömürlüdürler. Step motorlar geri beslemeye gerek duymadan hız ve pozisyon kontrolünde hata vermeden çalışırlar.
Step motor kullanarak yapılacak bir uygulamada öncelikle bilinmesi gereken step motorun her tam adımda döneceği derece miktarıdır. Step motor üzerinde adım derecesi yazılı değil ise step motor dikkatlice el ile döndürülerek adım sayısı sayılabilir. Adım sayısı bilindiğinde
360 ° adım sayısına bölünerek adım derecesi bulunur. Örneğin 20 adımlı bir step motor 360 ° lik tam bir dönüş içerisinde 18 ° lik adımlar ile ilerler.
360 ° adım sayısına bölünerek adım derecesi bulunur. Örneğin 20 adımlı bir step motor 360 ° lik tam bir dönüş içerisinde 18 ° lik adımlar ile ilerler.
Step motorlarda dört adet bobinden çıkan 4 ayrı uç ve bir de ortak uç olmak üzere 5 adet uç bulunmaktadır. Ortak ucun hangisi olduğunu bulmak için ohmmetre ile ölçüm yapılır. Ortak uç ile diğer uçlar arasında sabit bir direnç okunur, böylelikle ortak uç bulunur. Step motorlar direkt mikrodenetleyici çıkışından çalıştırılamazlar, çıkışların yükseltilmesi için transistör, Fet ya da özel step motor sürücü entegrelerin kullanılması gerekir. Ortak uca motorun çalışma gerilimi uygulanır ve diğer 4 uç da transistör ya da fet gibi anahtarlama elemanlarına bağlanır. Bu 4 ucun bağlantısı doğru olduğunda motor döner, yanlış olduğunda ise motor titreme yapar. Böyle bir durumda 4 ucun bağlantıları değiştirilerek yeniden denenmelidir. Doğru bağlantıyı bulana dek denemeye devam edilir. Bazı step motorlar 4 bobin ikişerli gruplara ayrılarak birer ortak uç çıkarıldığından 6 uçludur. İki ortak uç birleştirilerek 5 uçlu bir step motor gibi kullanılır. Yandaki şemada 5 uçlu bir step motor gösterilmektedir.
Step motor kontrolü sırasında akım darbeleri ne kadar sıklıkla verilirse step motorun hızı o kadar artmış olur. Step motor her akım darbesinde motorun yapısı ve frekans değeriyle orantılı olan belli bir açı kadar hareket eder. Step motora gönderilen akım darbeleri belli bir sıraya uygun olmalıdır. Bu sıra içerisinde sonraki darbe gönderilmeyip bir önce gönderilen darbe uygulamada bırakıldığında step motor frenlenmiş olur.
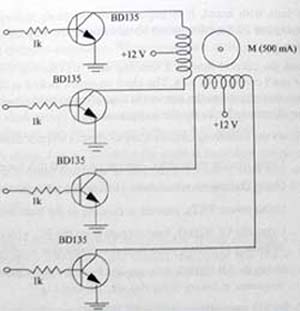
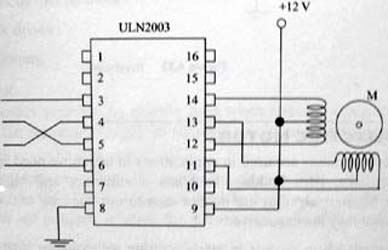
Aşağıda transistörler ile ve ULN2003 motor sürücü entegre ile step motor kontrolü için iki örnek devre verilmiştir. İlk devrede BD135 biploar transistörler kullanılmıştır. Bu devre 500 mA değere kadar kullanılabilir. İkinci devrede ise ULN2003 entegre kullanılmıştır. Bu devrede dört giriş bulunur. Her giriş bir bobini kontrol eder.
Transistör ile Step Motor Kontrolü
|
 |
ULN2003 ile Step Motor Kontrolü
|
 |
SERVO MOTOR
Servo motorlar gönderilen kodlanmış sinyaller ile şaftları özel bir açısal pozisyonda döndürülebilen motorlardır. Kodlanmış sinyal servo motorun girşine uygulandığı sürece servo motor şaftın açısal pozisyonunu korur. Kodlanmış sinyal değiştirilirse şaftın açısal pozisyonu da değişir.
Servo motorlar çeşitli robot projelerinde, robot kollarda, uzaktan kumandalı uygulamalarda sıklıkla kullanılır. Aynı zamanda yüksek güçlü servo motorlar endüstriyel otomasyonlarda da kullanılabilir.
Temel Prensip:
Bir servo motorun temel konfigürasyonu şekilde gösterilmektedir. Bir DC motor yüksek redüksiyon oranına sahip bir dişli kutusunu hareket ettirir. Sondaki şaft çok yavaş bir hızla dönerek dönme ekseni üzerindeki potansiyometreyi de çevirir. Potansiyometrenin amacı geri besleme yaparak servo motorun şaftının pozisyonun algılanmasını sağlamaktır. Potansiyometre algılanan pozisyona karşılık gelen voltajı, voltaj karşılaştırıcısı olarak kullanılan opampa gönderir. Bu voltaj değerinin, şaftın istenilen pozisyonunu belirleyen giriş voltajı ile karşılaştırılması ile karşılaştırcının çıkış voltajı belirlenir. Bu çıkış voltajı, motor şaftını girişte uygulanan sinyala karşılık gelen açuya uyması için gerekli yönde hareket ettirecek gücü sağlar.
Standart Konfigürasyon:
Bir servo motorun şaftının pozisyonunu kontrol etmenin bir diğer yolu kodlanmış bir sinyal kullanmaktır. Bu metot uzaktan kumandalı uygulamalarda kullanılan standart servolarda sıklıkla kullanılır.
Servonun kontrol girişine 18 ms periyotlu palslardan oluşan bir sinyal gönderilir. Palsın süresi servo motorun şaftının 180º 'lik bir aralıktaki pozisyonunu belirler. Eğer pals 1,5 ms uzunluğunda ise servo motorun şaftının pozisyonu 180 º 'lik aralığın ortasındadır. Pals 1 ms uzunlukta ise servo motor 90 º sola, 2 ms uzunlukta ise 90 º sağa hareket eder.
Bazı servo motorların pals uzunluğu aralığı 1,25 ms ile 1,75 ms arasındadır. Bu durumda pals uzunluğu 1,5 ms iken servo motor şaftı ortadadır. Pals uzunluğu 1,25 ms iken 90 º sola, 1,75 ms iken ise 90 º sağa hareket eder.
Servo Motor Çeşitleri:Standart servo motorların üç kablosu vardır. Bunlardan biri power (4 V ile 6 V arasında), biri toprak, diğeri ise kontrol girişi içindir. Kabloların renkleri ise genellikle power için kırmızı, toprak için siyah ve kontrol için beyazdır.
Servo motorların boyutları ve şekilleri planlanan uygulamaya bağlıdır. Yandaki resimdeki servo motor ve benzerleri robotikte sık kullanılan servo motor tipleridir. Bunlar düşük güçte çalışabilir, kullanılan servo motorun karakteristik özelliklerine ve uygulamaya bağlı olarak 100 mA ile 2A aralığındaki DC voltaj kaynakları ile beslenebilirler.
Endüstriyel ve mobil uygulamalarda kullanılan AC voltaj ile çalışan servo motorlar da vardır.
Step Motorun Karakteristikleri:
Diğer motorlarda olduğu gibi servo motorlarında elektriksel ve mekaniksel olarak önemli karakteristik özellikleri vardır. Bunlardan en önemlileri aşağıda açıklanmıştır.
Güç Sağlayıcı (Power Supply) Voltajı:Normal robotik uygulamalarında sıklıkla kullanılan servo motorlar için bu voltaj değeri genellikle 4 V ile 6 V aralığındadır. Bu aralığın dışında özel tipte servo motorlar da bulunabilir.
Akım:
Burada akım ile kastedilen servo motorun bir yüke maksimum tork uyguladığında çektiği akımdır. DC motorlarda olduğu gibi bu akım değeri yüke göre değişir. Genellikle servo motorların maksimum akım aralığı 100 mA ile 2 A arasıdır.
Uygulama Hızı:
Uygulama hızı servo motoru şaftının belirli bir pozisyona (normalde 60 º) gelebilmesi için gereken zaman olarak tanımlanır. Genellikle servo motorların uygulama hızları 0,05 s / 60 º ile 0,2 s / 60 º arasındadır.
Tork:
Diğer motorlarda oludğu gibi tork kg / cm ya da N-cm olarak verilir. Genel tork değerleri 0,5 kg / cm ile 10 kg /cm arasındadır.
Kontrol Palsi:
Kontrol palsi şaftın belli bir pozisyona gelebilmesi için kullanılan pals tipidir. Uygulamalarda kullanılan iki ana tip vardır. Bunlar 1-2 ms aralığında pals ve 1,25-1,75 ms aralığında pals değerleridir.
1-2 ms Servo Motorların
Pals Sürelerine Göre Açıları |
1,25-1,75 ms Servo Motorların
Pals Sürelerine Göre Açıları | ||
|---|---|---|---|
Süre (ms)
|
Açı (derece)
|
Süre (ms)
|
Açı (derece)
|
1,0
|
-90
|
1,25
|
-90
|
1,1
|
-72
|
1,30
|
-72
|
1,2
|
-54
|
1,35
|
-54
|
1,25
|
-45
|
1,40
|
-36
|
1,3
|
-36
|
1,45
|
-18
|
1,4
|
-18
|
1,50
|
0
|
1,5
|
0
|
1,55
|
18
|
1,6
|
18
|
1,60
|
36
|
1,7
|
36
|
1,65
|
54
|
1,75
|
45
|
1,70
|
72
|
1,8
|
54
|
1,75
|
90
|
1,9
|
72
| ||
2,0
|
90
| ||
Kararlılık, bir komut sinyali algılandığında servo motorun şaftının pozisyonunun istenilen açıya göre kesinliğidir. Genellikle servo motorların kararlılık aralığı 1 º ile 10 º arasındadır.
MOTOR SÜRÜCÜ ENTEGRELERİ
Mikrodenetleyicilerin çıkışları DC motorları veya step motorları direkt olarak kontrol etmek için yetersiz olduğundan motor sürücü devreler kullanılır. Motor sürücü devreler ile mikrodenetleyicilerin çıkışlarından alınan sinyaller yükseltilerek motorların kontrolü sağlanır. Motor sürücü devreler transistörler kullanılarak H köprüsü ve benzeri şekillerde hazırlanabilir. Ancak genellikle kolaylık açısından motor sürücü entegre devreler tercih edilmektedir.
Robotikte en sık kullanılan motor sürücü entegre devreler; DC motor kontrolleri için L293D, L293B, L298 motor sürücü entegrelerdir. Motor sürücü entegre seçiminde temel özellik entegrenin kullanım voltajı ve akım sınırı gibi özellikleridir.
L293D ve L293B Entegresi:
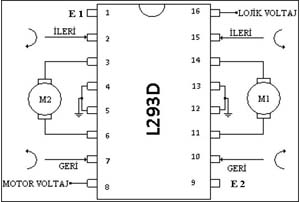
L293D ve L293B motor sürücü entegreleri içlerinde iki adet H köprüsü barındıran 16 bacaklı motor sürücü entegrelerdir. Genellikle DC motor kontrolünde tercih edilen motor sürücü entegreler olan L293D ve L293B ile iki motor birbirinden bağımsız olarak çift yönlü kontrol edilebilmektedir. Ayrıca L293 motor sürücü entegrelerin enable bacaklarının kullanılmasıyla PWM kontrolü de yapılabilmektedir.
L293D motor sürücü entegresi 4,5 V ile 36 V aralığında maksimum 600 mA akım sınırına kadar kullanılabilir. L293B motor sürücü entegrenin ise aynı voltaj aralığında, maksimum 1 A akım sınırına kadar kullanılması mümkündür.
L293D motor sürücü entegresi 4,5 V ile 36 V aralığında maksimum 600 mA akım sınırına kadar kullanılabilir. L293B motor sürücü entegrenin ise aynı voltaj aralığında, maksimum 1 A akım sınırına kadar kullanılması mümkündür.
Yukarıda L293 motor sürücü entegrenin bacak yapısı ve bağlantıları verilmiştir. Bu özellikler L293D ve L293B için aynıdır. Şemada iki motorun birbirinden bağımsız olarak çift yönlü sürüşü için gerekli bağantılar gösterilmiştir. Burada lojik voltaj değeri 5 V, motor voltajı ise kullanılan motoru sürmek için gerekli voltaj değeri olup bu değer 36 V değerini geçmemelidir.
L298 Entegresi:
L298 motor sürücü entegresi genellikle L293D ve L293B gibi motor sürücü entegrelerin maksimum akım sınırlarını aşan motorların kontrolü için tercih edilen 15 bacaklı bir motor sürücü entegredir.
L298 motor sürücü entegre kullanımında voltaj sınırı 46 V, akım sınırı ise 2 A değerindedir.
L298 motor sürücü entegre de L293 motor sürücü entegreler gibi içerisinde 2 adet H köprüsü bulundurur ve iki motoru bağımsız ve çift yönlü olarak kontrol edebilir.
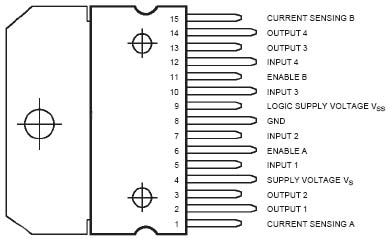
 Yukarıda L298 motor sürücü entegresinin bacak yapısı verilmiştir. Burada 5. ve 7. bacaklar birinci motorun, 10. ve 12. bacaklar ise ikinci motorun çift yönlü kontrolleri için giriş bacakları olup 2. ve 3. bacaklar ve 13. ve 14. bacaklar ise bunlara karşılık gelen çıkış bacaklarıdır. L298 4. bacağına kontrol etmek istenilen motora uygun voltaj verilmeli ve bu voltaj değeri 46 V değerini aşmamalıdır. 9 numaralı bacağa uygulanacak olan voltaj 5 V değerindedir. 8 numaralı bacak ise toprak bağlantısının yapılacağı bacaktır.
Yukarıda L298 motor sürücü entegresinin bacak yapısı verilmiştir. Burada 5. ve 7. bacaklar birinci motorun, 10. ve 12. bacaklar ise ikinci motorun çift yönlü kontrolleri için giriş bacakları olup 2. ve 3. bacaklar ve 13. ve 14. bacaklar ise bunlara karşılık gelen çıkış bacaklarıdır. L298 4. bacağına kontrol etmek istenilen motora uygun voltaj verilmeli ve bu voltaj değeri 46 V değerini aşmamalıdır. 9 numaralı bacağa uygulanacak olan voltaj 5 V değerindedir. 8 numaralı bacak ise toprak bağlantısının yapılacağı bacaktır.
TORK:
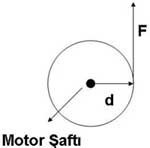 Tork, motordan hareket parçalarına (tekerlek, dişli, palet...vb) iletilen itme kuvveti ya da dönme momentidir. Yandaki şekilde gösterildiği gibi bir motorun şaftına bağlı bir tekerleğin bulunduğu bir düzenekte tork, kuvvetin motor şaftına olan uzunluk ile çarpımına eşittir. ( T = F x d ). Torkun birimi Newton metredir (Nm).
Tork, motordan hareket parçalarına (tekerlek, dişli, palet...vb) iletilen itme kuvveti ya da dönme momentidir. Yandaki şekilde gösterildiği gibi bir motorun şaftına bağlı bir tekerleğin bulunduğu bir düzenekte tork, kuvvetin motor şaftına olan uzunluk ile çarpımına eşittir. ( T = F x d ). Torkun birimi Newton metredir (Nm).
Bir motorun gücü o motorun torkunun açısal hızı ile çarpımına eşittir. ( P = T x w ) Motor gücü (P), motora uygulanan voltaj ile motorun çektiği akımın çarpımına eşittir. ( P = V x I ) Açısal hız ise motorun frekansının ( motorun bir saniyede tamamladığı tur sayısının) pi sayısı ile çarpımının iki katıdır. ( w = 2 x pi x f )
Herhangi bir projeye başlarken motor seçimi sırasında kullanıcının motor hakkında bilmesi gereken en önemli özelliklerden biri torktur. Eğer motorun tork bilgisi mevcut değilse torkun ölçülmesi ya da hesaplanması gerekir.
Elinizdeki motorun güç ve devir sayısını biliyorsanız, aşağıdaki tork hesaplama kısmını kullanarak motorunuzun torkunu hesaplayabilirsiniz. Bu formda kullanmanız gereken güç birimi watt, devir sayısı ise motorunuzun bir dakikada tamamladığı devir sayısıdır (rpm).
Hiç yorum yok:
Yorum Gönder