
#include <Servo.h>
Servo servoMotorum;
int derece = 0;
void setup()
{
servoMotorum.attach(9);
}
void loop()
{
for(derece = 0; derece < 180; derece += 1)
{
servoMotorum.write(derece);
delay(15);
}
for(derece = 180; derece>=1; derece-=1)
{
servoMotorum.write(derece);
delay(15);
}
}
Servo servoMotorum;
int derece = 0;
void setup()
{
servoMotorum.attach(9);
}
void loop()
{
for(derece = 0; derece < 180; derece += 1)
{
servoMotorum.write(derece);
delay(15);
}
for(derece = 180; derece>=1; derece-=1)
{
servoMotorum.write(derece);
delay(15);
}
}
2 ) Potansiyometre ile servo motor hareket kontrolü
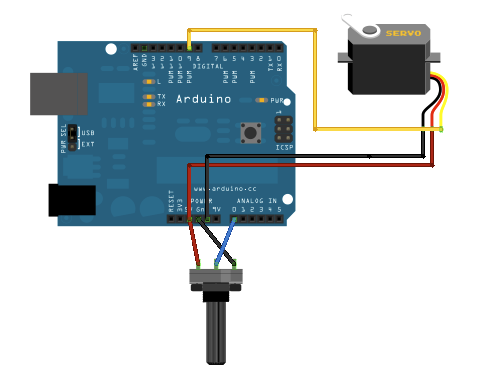
#include <Servo.h>
Servo myservo;
int potpin = 1;
int val;
void setup()
{
Serial.begin(9600);
myservo.attach(9);
}
void loop()
{
val = analogRead(potpin);
val = map(val, 0, 1023, 0, 180);
Serial.println(val);
myservo.write(val);
delay(15);
}